
Tech & IP
부력중심을 제어하는 부력 조절 시스템
- 개요
-
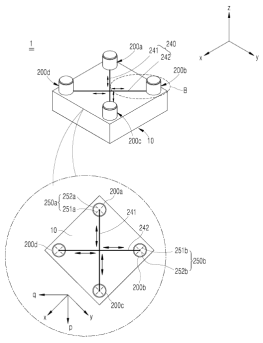
본 기술은 수중에서 무인잠수정의 특정 자세를 유지하거나 거동을 미세하게 조절하기 위해 적어도 3개 이상의 부력조절부를 구비하여 부력중심을 제어하는 부력 조절 시스템에 관한 것임
- 필요성
-
무인잠수정은 중력과 부력이 서로 같아서 평형을 이룬 상태인 중성 부력을 바탕으로 기동하는 것으로, 제어 방식에 따라 전원과 제어 명령을 전달하는 원격제어무인잠수정과 자율적인 항해와 작업능력이 있는 자율무인잠수정으로 나뉨
수중에서는 추진력에 의한 이동 외 다양한 변수(연직방향 외란 등)가 더 생기기 쉬워 무인잠수정의 자세를 제어하는데 있어 어려움이 많았음
무인잠수정의 수직 스러스터와 같은 부력을 조절하는 수단을 대체하여 무인잠수정의 양성 부력 및 음성 부력의 조절이 용이함은 물론, 무인잠수정의 어느 한 부분이 기울거나 할 때에도 중성 부력을 유지하여 강한 조류에서도 안정적인 호버링(hovering)을 하거나 특정자세를 유지할 수 있는 기술이 요구됨
- 특장점
-
무인잠수정의 전후동요(Surge), 좌우동요(Sway), 상하동요(Heave), 횡동요(Roll), 종동요(Pitch), 및 선수동요(yaw)의 움직임에 대응하여 중성 부력을 유지하는 효과를 제공함
무인잠수정이 특정 자세로 작업할 시, 다수개의 부력조절부를 선택적으로 조절하여 작용하는 힘과 반대가 되는 부력을 발생시켜 횡동요를 감소시키는 효과를 제공함
무인잠수정을 운항하는 데 필요한 전력을 최소화하는 효과를 제공함

- 기존 기술대비 개선점
-
본 기술은 무인잠수정이 수중에서 이동 및 작업할 때, 특정 자세를 유지하거나 거동을 미세하게 조절하고, 장애물 충돌에 의한 관성력이나 추진력에 의한 관성력의 크기를 상쇄하기 위한 수단을 제공함
- 활용분야
-
잠수정을 포함하여 부력을 조절해야 하는 다양한 수중 기기에 활용 가능함

- 시장 동향 및 전망
-
전세계 자율무인잠수정(autonomous underwater vehicle, AUV) 시장 규모는 2020년에 11억 6000만 달러로 추산되었음. 이는 17.8%의 연평균 성장률로 성장하여 2028년 41억 7000만 달러에 이를 것으로 전망됨
자율무인잠수정은 과학 연구, 상업 및 보안과 같은 다양한 수중 적용을 위한 해양 탐사 활동에 널리 사용됨
군대, 해군 및 연안 보안군, 특히 해저 작전에서 주요하게 사용되며, 미 해군은 기뢰대응(mine countermeasures, MCM), 정보, 감시 및 정찰, 검사/식별(ID), 대잠전(anti-submarine warfare. ASW)과 같은 다양한 응용 분야에 자율무인잠수정을 광범위하게 사용함 (출처 : fortunebusinessinsights)
